Ch14. Deep Neural Networks
포스트 : 2022.12.20.
최근 수정 : 2022.12.20.
Challenges of Image Classification
- Viewpoint variation
- Illumination
- Deformation
- Occlusion
- Background Clutter
Object detection/ Semantic segmentation/ Instance segmentation
Before Neural Nets, Classical Approach
Template-based Approach
- Find a sub-image of the target image that matches a “template” image
- Straightforward result, we know what we are looking for
Feature-based Approach
- Find strong, representative features on images, like edges or corners
- How to classify the result? Let a classifier “learn” the obtained features
Data-driven approach
Use Machine Learning to train a classifier
Use a feature descriptor combined with a classifier
- Feature descriptor is a representation of useful information on an image
- Points, edges, curves, color ...
Histogram of Oriented Gradients (HOG)
- Characterizes object appearance and shape
- Gradient : Changes in pixel intensity across an image
- Image is divided into small connected regions called cells, calculate gradient for the pixels within each cell
- Normalization of histogram : group adjacent cells into regions called blocks, for invariance in illumination and shadowing
- Famous application : Histograms of Oriented Gradients for Human Detection
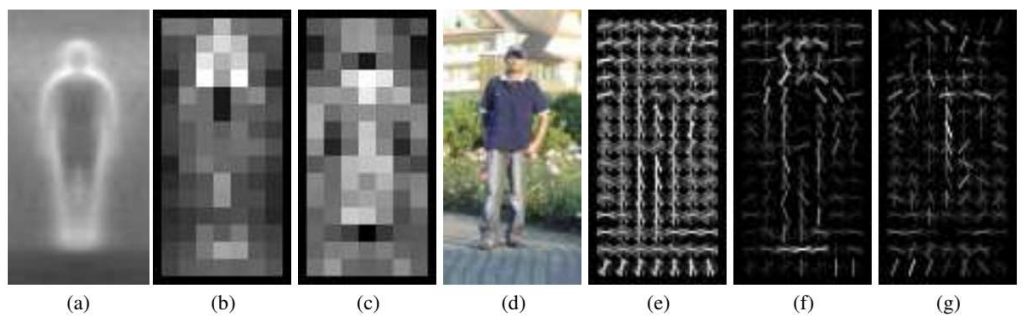
- b : each pixel shows the maximu, positive SVM weight in the block centred on the pixel
- c : likewise for the negative SVM weights
- e : computed R(rectengular)-HOG descriptor
- f, g : the R-HOG descriptor weighted by respectively the positive and the negative SVM weights
- Classifier is a method for determining class of unknown object
- Nearest Neighbours, K-Nearest Neighbours, Support Vector Machine (SVM) ..
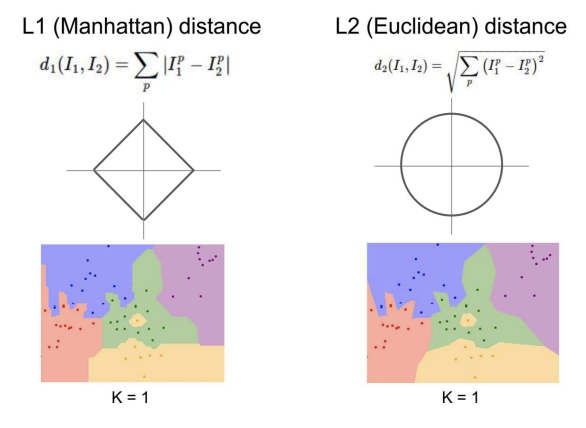
Nearest Neighbour
- Simple training, just memorize all data and labels
- Compare images using Distance metric
K-Nearest Neighbour
- Consider majority vote from the K closest points
- Compare images using distance metric
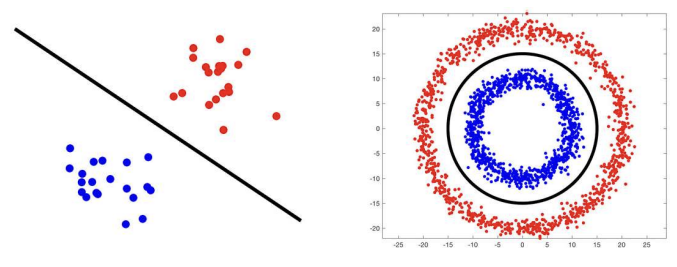
Support Vector Machine (SVM)
- Suppose we have points in an n-dimensional space and class labels attached to those points. SVM will divide the space such that different classes ends on different sides of the plane
- Two types : linear and non-linear
Neural Network (NN)
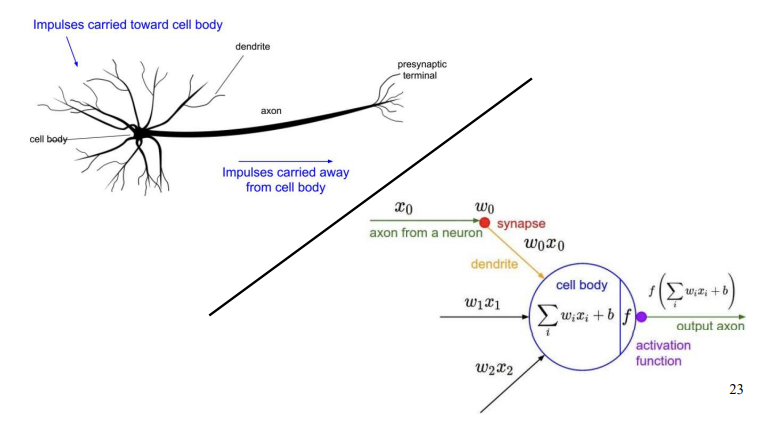
Different options for Activation functions
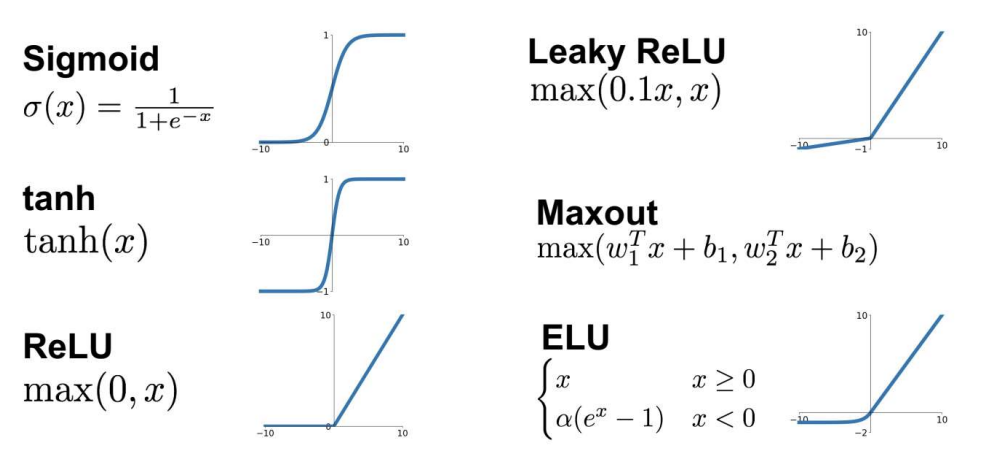
Sigmoid / tanh → problem of vanishing gradient
ReLU : adventageous when back propagation
Deep Neural Network (DNN)
- Shallow Neural Newrorks : 1 hidden layer
- Deep Neural Networks : more than 2 hidden layer
Convolutional Neural Network (CNN)
- Local connectivity
- Weight sharing
Convolutional Layers
- Slide over the image computing dot products with a filter/weight (represent features)
- Produces a feature map
ReLU Layers
Allows CNN to account for non-linear relationships
Can use other activation functions
- ReLU generally works better in practice
- Sigmoid not recommended
Pooling Layers
- Translational Invariance ⇒ Output remains the same even if feature is moved a little
- Reduce the size of feature map
- Different ways to implement
- Max Pooling
- Average Pooling
- Min Pooling
- …
Fully-Connected Layers
- Final layer
- Returns probability of class for the objects in image